I have a merged point cloud which looks pretty good, no noise etc.

But when I mesh this PC, things get worse:
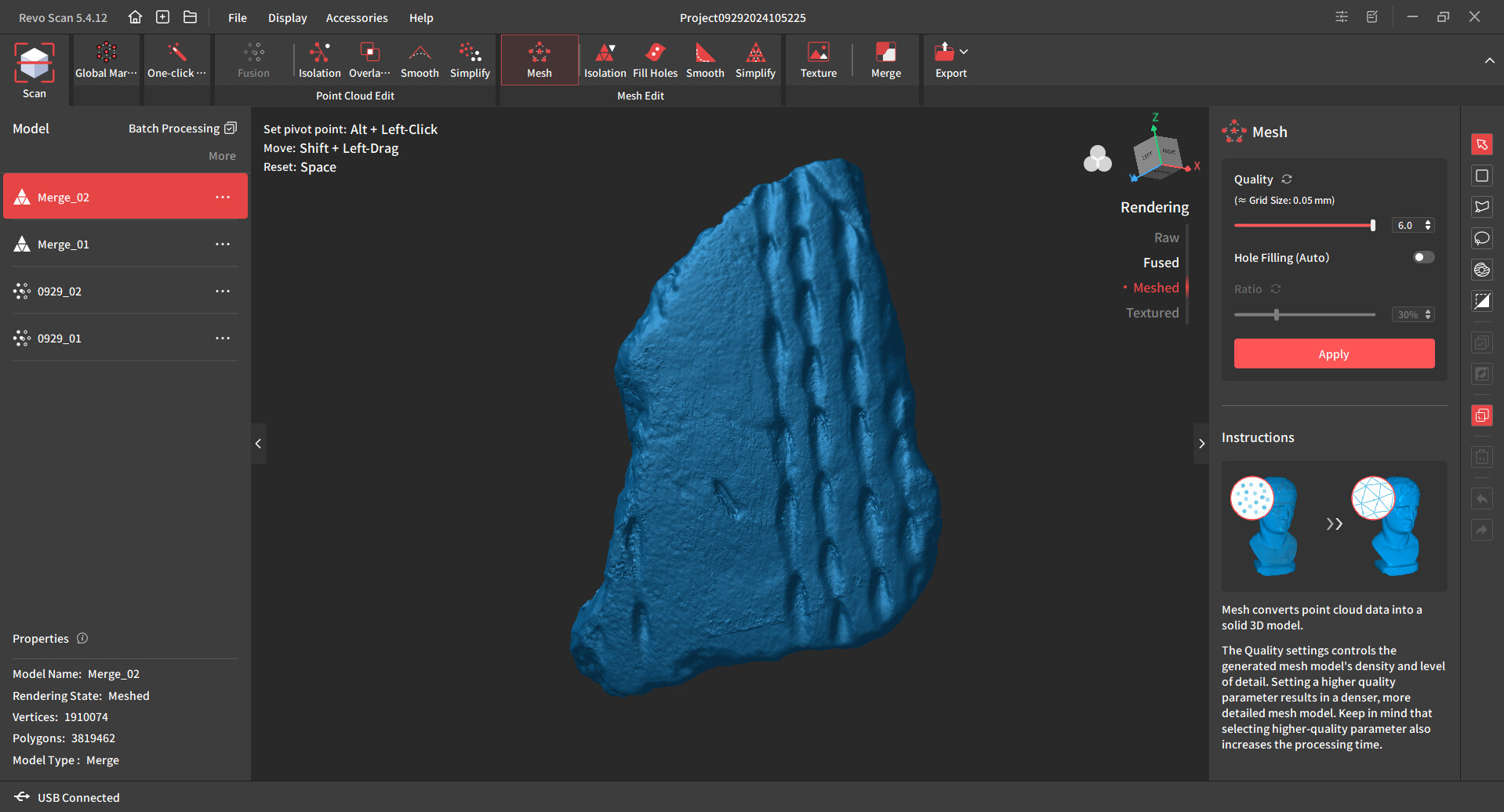
What went wron here an how can I prevent this issue?
Looks like overlapping data. Maybe a merged scan with points underneath the surface. Take it to CloudCompare and have a look inside. I had this problem and it turned out that i had a part surface 0.2mm under the outer skin. Meshing algorithm takes this into generating the mesh and so it gets distorted.
You can also try to clean the mesh in RevoScan, but i am more convenient with CloudCompare. It get’s this type of job faster.
Tell us if you find the Problem.
Good Luck!
all PCs were cleaned before meshing…
Could you share the data? To have a look at it?
And by the way, what is it?
Please calibrate your MINI
Make sure the distance between both scans are as closer as possible.
Trump the edges of both scans especially the curled one .
Don’t use too high fusing settings and always the same on both scans you try to merge .
Mesh using the Grid as reference.
You know the algorithms are still in the process of improving and they working on .
I did all you recommended. Just funny, how mesh is worse than point cloud. Never experienced this before. I dont think that my mini 2 needs recalibration, but I will try it.
Mesh can be only as good as point cloud , and that point cloud don’t looks ok .
You can use Cloud Compare to clean up the point cloud
Meshing only connect the already there points , it do not creates anything else unless the Grid is higher than fusing , but in this case it is the point cloud fault and not mesh .
The second scan caused that issues , it was not proper alignment , propably both scans have slightly different accuracy from what I see .
Is there a youtube-tutorial about cleaning pcs on cc?
The SOR filter is your friend and you can sometimes pick out points using the density. I don’t know of any videos that are specifically tailored to meshes of such scans.
CloudCompare is more widely used in photography and landscape recognition.
But I’m also wondering why it looks better on the scanner than on the PC. I mean, it’s the same point cloud in both cases.
Here you go Daniel , I recommend you clean the scans before merge and meshing
Cloud Compare is free Cloud Point editing software in general that can handle very big point clouds .
What do you mean used in photography ?
Over 10K of users use it with Revo point devices .
The best point cloud editing software out there available .
If you talk the talk, you better walk the walk ![]()
BTW you both speak German , would be not easier to help brother in need in German language ? Just thinking …
What I meant was that CloudCompare was a doctoral thesis and was initially intended to measure glaciers. The landscape survey and the associated filters are still omnipresent in the program today. Some algorithms and tools specifically for 3D scanners like the ones we use are not included.
I miss an alignment to the base coordinate system, faces, better selection tools etc.
I generally always use CloudCompare and didn’t mean to say that it isn’t suitable.
It can be used for a variety of tasks, including:
1.Editing: Users can edit models, filter them, and register or align them
2.Comparison: Users can compare point clouds or point clouds and meshes to see similarities and differences
3.Visualization: Users can create and share 3D visualizations with rendering, animation, and other tools
4.Advanced processing: Users can access advanced algorithms for registration, resampling, and more
That are the major points why Cloud Compare is popular for
Processing 3D point clouds and meshes.
The rest is not important
That’s not what the software description says , and a little discouraging and misleading to say that . What others use it for is not relevant.
Most important is free , and very usable in many cases and have most things we are currently missing in RS5.
Exactly, a lot of tasks can be done with it, as I said, I use it too.
Nevertheless, the project would be brought into the world with the background in order to survey landscapes with drones, ask the autor: https://www.linkedin.com/in/daniel-girardeau-montaut-8a0b4a1?utm_source=share&utm_campaign=share_via&utm_content=profile&utm_medium=android_app
It was his doctoral thesis.
But the primary question here is: why does the mesh in RevoScan on the device look different than in Revoscan on the PC with the same point cloud. I think that’s an interesting question.
What look different on a device ? It was scanned with MINI ?
Do I miss something ?
Daniel have this issue since the first time he try to merge objects after scanning with MINI
I checked your files the other day , there was no seams anywhere after merging .
It can be bad calibration or older firmware .
Still not determined 100%
But I have the same issue with Mini series as Daniel
When scanning with so high accuracy , any changes in distance will deliver different accuracy in both scans , it is difficult to get it right each time as it depends of the objects, angle etc…
I would like to see the other scan after fusion .
And see how different it is and how well scanned .
The merged point cloud don’t looks right . It is just smoother , if you mesh it on lower grid then u will get the same result
Point loud is made of points not faces so it will look different in open GL
PC= Point Cloud
@ingManiac Sebastian is right about overlapped data from the preview scan , it was propably not cleaned after merge for lose points and overlapped points .
The registration in RS5 is rather simple and not so advanced as in Cloud Compare , more of a preview than actual full registration.
But there is still a bug that is in process of being fixing so we have wait for it .
For this case ? Automatic process will not fix it … Cloud Compare maybe could .
Ahh okay I thought he had a worse mesh on the computer than on the device itself (Miraco/Android app), my mistake ![]()
It looks better but still the second scan don’t looks correct
Point cloud don’t have faces is it will be always softer , however I would not approve the merging results from that scans .
It is the second scan that create the issue not the merge or the meshing .


