There is a bug (or a couple) with the merge tool that leads to significantly lower quality output. This issue has been flagged multiple times (over a year ago) but the bug is still present. PUTV said the fix was in beta testing in July of 2024.
I just want to make sure this is being tracked and can get addressed relatively soon, since it’s been plaguing the software for over a year.
Can you share some screenshot about the lower quality output you are getting because I don’t get any in the latest version after merging other than counting points ? Merging is about accuracy so please check the accuracy before and after merge like for example measurements of all the scan and after merge , other wise I have no case as I did not experienced any quality lost after the latest public versions releases .
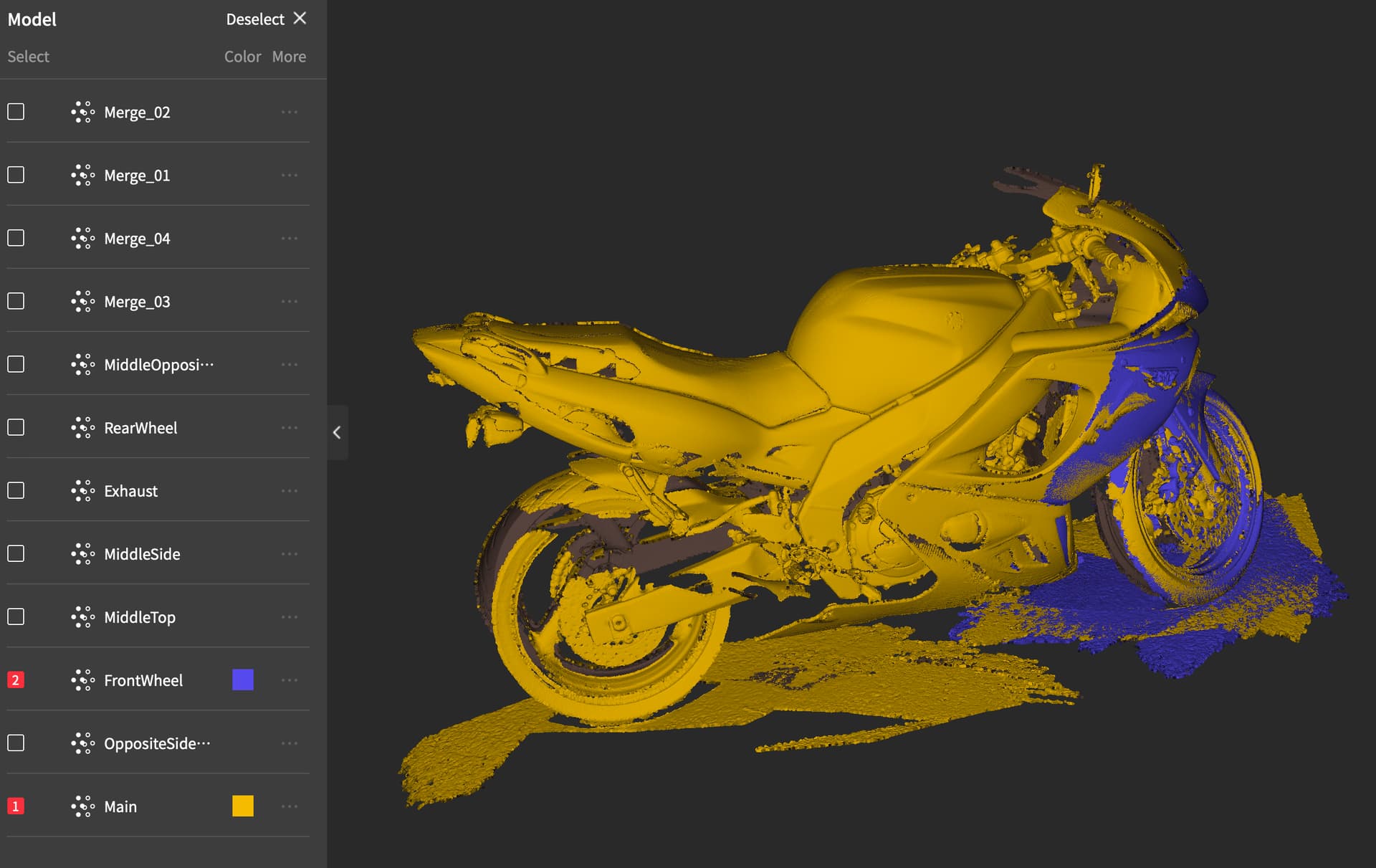
The result is a significantly worse model (even on parts that shouldn’t have been touched by the merge). This makes the merge tool unusable for when you need a high detail point cloud.
This is on MacBook Pro, 64GB of ram.
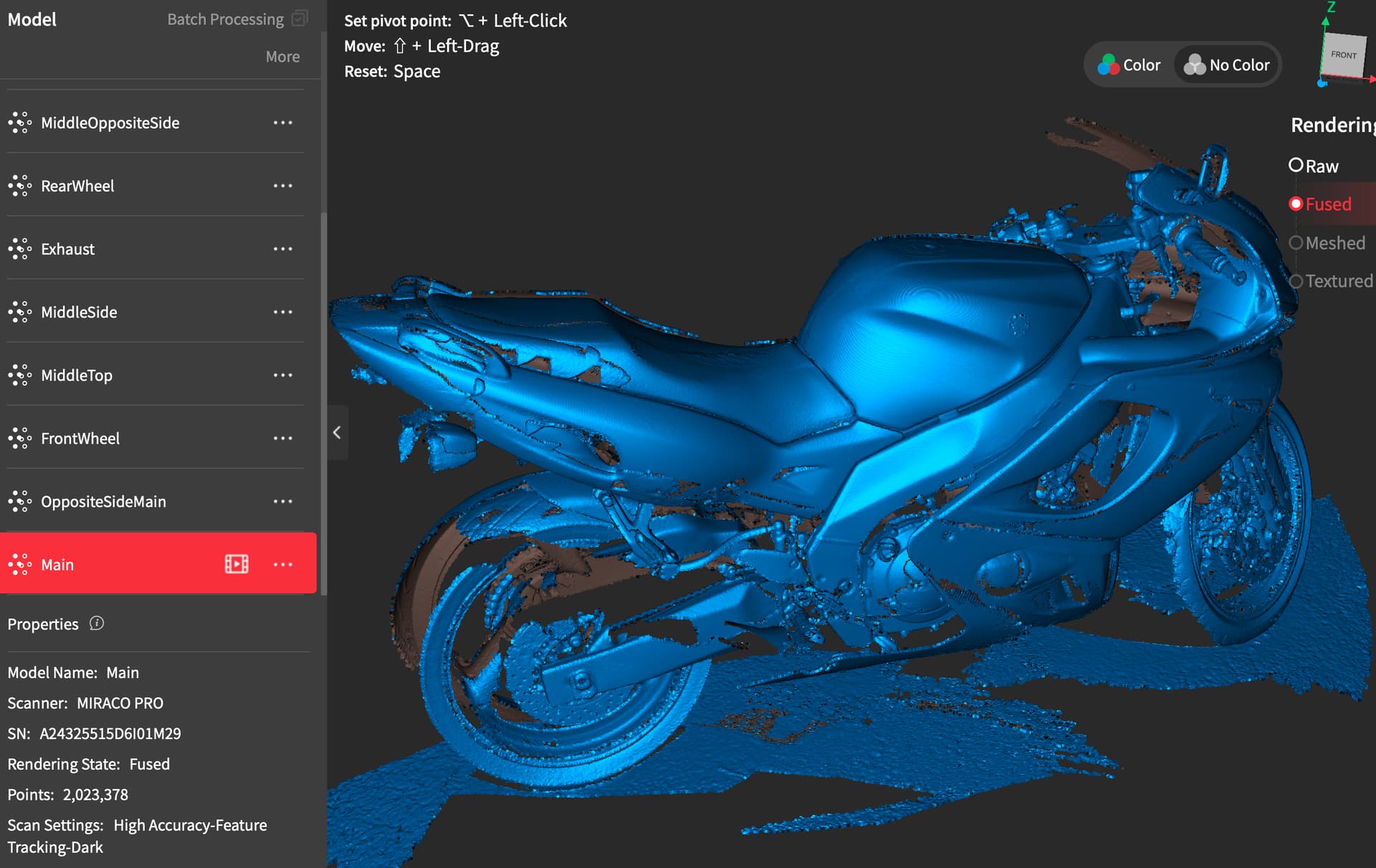
Revo Scan 5 V5.5.3.1727
You need to remove and clean the scan from everything that do not belongs to the bike to successful merge it, this means you need to clean out the floor , any overlapped or lose points . Fused point cloud only
Additional stuff like floors or any elements that do not belong to the object you are scanning will interfere with proper merging .
The merging function use face recognition algorithms, anything that do not belongs in the scan will set it off resulting in false results.
So there is definitely a bug causing some smoothing over the entire model. The output looks far worse than both of the inputs. Even when I fix everything you mentioned (as I did with both of these inputs prior to merging)
Ok thank you , I can’t test MAC version personally since I run Windows only and this version is updated to 5.5.4.1776 , I will forward your report regarding the smoothing out issues as it looks indeed not correct here from what I see.
The R&D suggest that you always choice the best and sharpest accuracy scan as first when merging other scans with . It was designed this way and it’s not a bug.
If you choice as first the one that is more blurry it will turn everything else into the same algorithms / accuracy as more blurry result .
I made tonight tests with all software and their merge tabs , as comparison full scan vs merged scan .
Okay, I repeated the test but swapped the order. First selecting the higher quality fusion. I’m still getting a worse output than both, there is still smoothing going on.
I don’t see how this isn’t a bug. There should be no additional smoothing applied to the point cloud. Furthermore, it gets worse each time a new merge is made, even when selecting the higher quality fusion first. So if I take several high quality scans of an object, merging them in RS5 leads to an unusable model for a lot of people.
You can see this in your own test example. Note the top of the feather
You literally overlapping a good scan with a bad scan , this is bad example to argue on .
If you use a PART of the good scan the algorithms make sure it stays the way and the other bad PART will be always bad . Not overlapping them together completely .
That is not a bug , that is user error .
Please contact customer@revopoint3d.com for reporting more of your issues and include a proper example of your project with it for the argument . Technician will evaluate it
There is not lose of anything , the final meshed scans have exactly the same amount of polygons with minimal loss for the overlapped parts from each part , but after meshing both was around 10 milion poly .
Merge also remove overlapped points that was not removed while cleaning and other junk data . I checked it after with edge detection and there was NOT difference in final mesh .
The preview of the point cloud in Revo Scan viewport is simplified to reduce the load on the graphic card . I can’t eyeball the result , I use software to do the measurements.
I confirmed it does work this way, using intentionally mismatched point cloud densities. I even dug up the tire scan linked to above.
The downside is that sometimes you could be forced to pick them in the wrong order just to have the parts align (order counts there too). So it’d be nice to have a setting like “Keep highest point cloud density” or something.
That why it crucial to keep always the same distance when scanning objects for merge , I always use my desktop arm for small and medium objects to avoid the shift in accuracy .
This is something any other scanner using this technology deal with , Structured Light scanners provide the best accuracy at a specific distance .
Unless you use MIRACO PLUS where this issue was replaced with global photogrammetry markers so small and big details are always in focus no matter the distance .
Any other software in the world will create a "scar " between 2 scans with different accuracy /resolution unless the points are optimized in final processing .