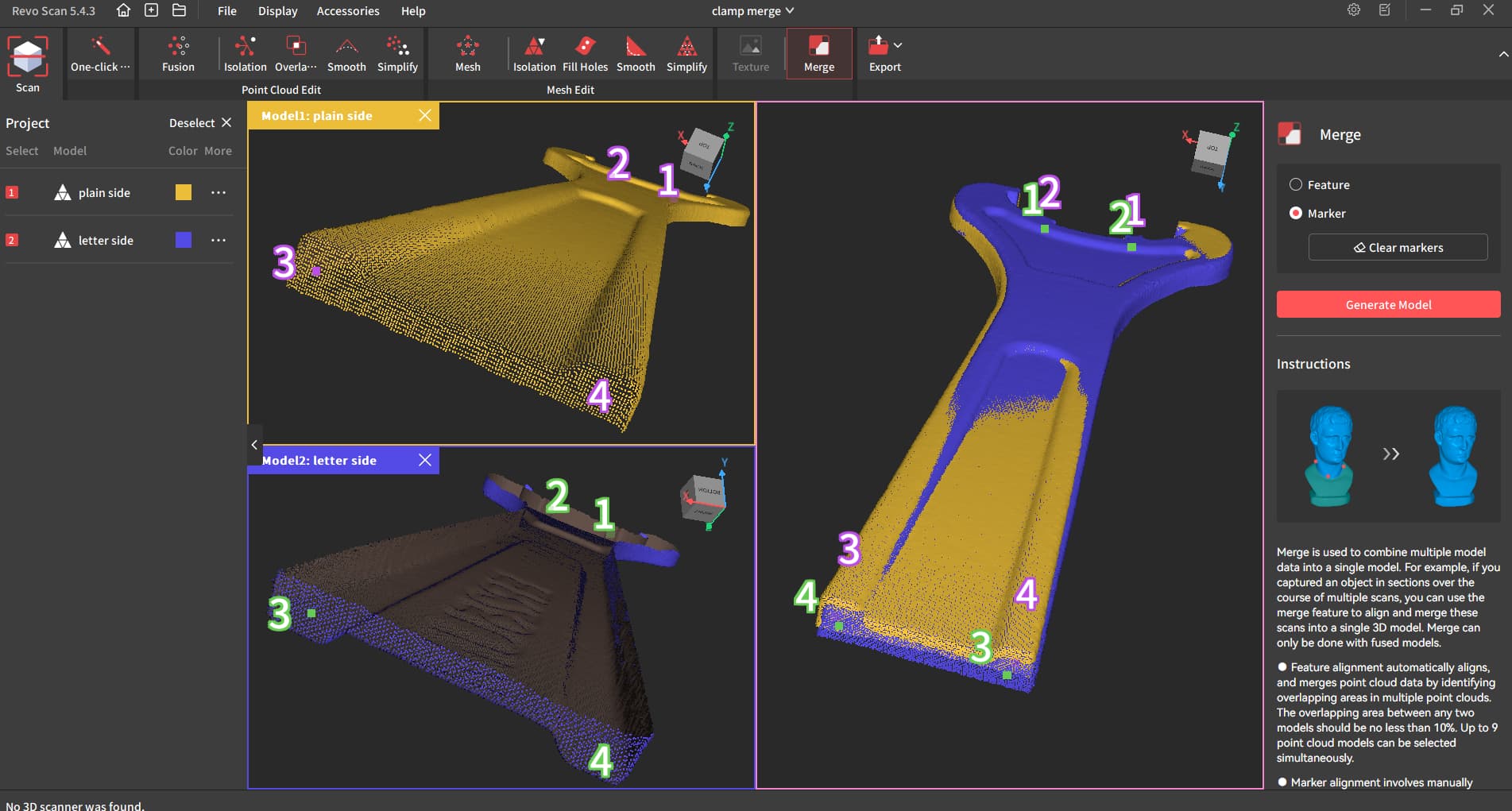
Just tried to merge the scans of a wrench using the marker method. Don’t expect any good results because there is not much overlapping between the two scans. The surprise is that the software does not even line up the markers correctly as seen in the picture. Need some helps here.
So you just placed random markers and expect it to align proper ? How you find the the same points on a surface that is completely flat ?
I guess your problem is again a result of a poor workflow resulting in your own errors.
Do you have any scanning knowledge ?
Or experience working with a point cloud ?
Because that is not the proper approach and no one software on the world will align it using the way you doing it .
The marker locations are not accurate for sure but its not random either. In all the videos on marker-based merging I have come across. The markers are placed on rather fussy features that do not precisely define a point nor the operator tried to zoom in to place the markers more accurately. As said in the post I did not expect very good alignment in this case but the software putting different markers at the same position is kind of puzzling.
Do I have any scanning knowledge ? Obviously not much and thats why I am seeking supports here.
Thanks for your helpful reply and have a nice day ![]()
You can’t just place it where you want , you need to find some feature on both scans to make successful merge .
Nobody place it on random surface as that is not how the feature works .
Marker point mode is the same as feature .ode with the difference that YOU decide what features will be used , on top both features need to be visible in both scans .
You saw videos did the job and it did not worked , and that is the reason why you not success.
I am asking you about your level , to know better how to help you with .
Your posts rather looks like a statements than seeking help . So I just make sure we understand each other well .
It is impossible to find the same point in both scans using Revo Scan , since the registration is rather simple and do not tell you specifically what the level of error is in placing markets on both scans , so it is more of eyeballing work .
The best solution is if you find more defined feature and place the market there .
Don’t scan the top and bottom , scan half top and half bottom this way you get lots of features where you can place you corresponding marker points .
Meaning scan 360 degrees vertical, cut off the bottom , then turn it on the other side vertically and do the same , clean both scans from raw edges , lose points and overlapped points , then go to merge tab and place your marker points on the reach feature areas , you need perfect placed 3 points to make this work successful.
Looking forward to see it in action .
Don’t start new thread just continue it here .
1 Like
Looks for all the world like it ignored the markers and did feature alignment.
Pure speculation on my part, but if the markers really don’t define a feature that’s useful perhaps it reverts to feature merging. I’ve noticed on scans with symmetrical features it loves to flip them 180 degrees even if they start in nearly in alignment.
1 Like
That why you have manual marker mode to avoid flipping , still you need to find features on the object the whole point of registrations no matter what software you use . Of course other programs like Cloud Compare have advanced registration process beside the simple aligment what improve everything so much better .
That’s. not what happen as it is impossible , it simply did not found matching points suggested by the user and could not register it , in short the points was in wrong location what resulted in error .Normal behavior .
Thanks for the detailed explanation. Things start to make sense to me now.
1 Like
You welcome , if anything you would like to know , don’t hesitate to ask !
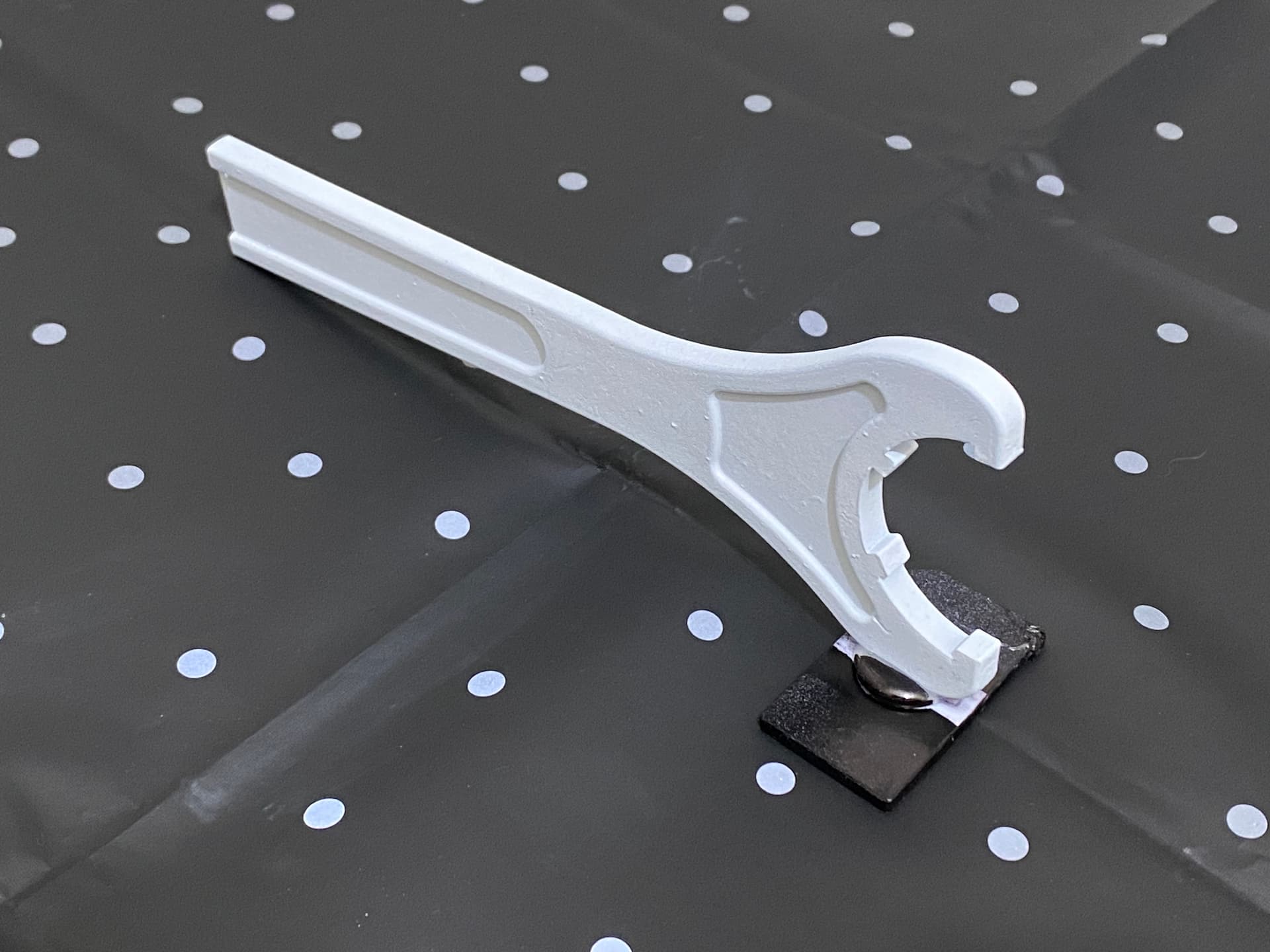
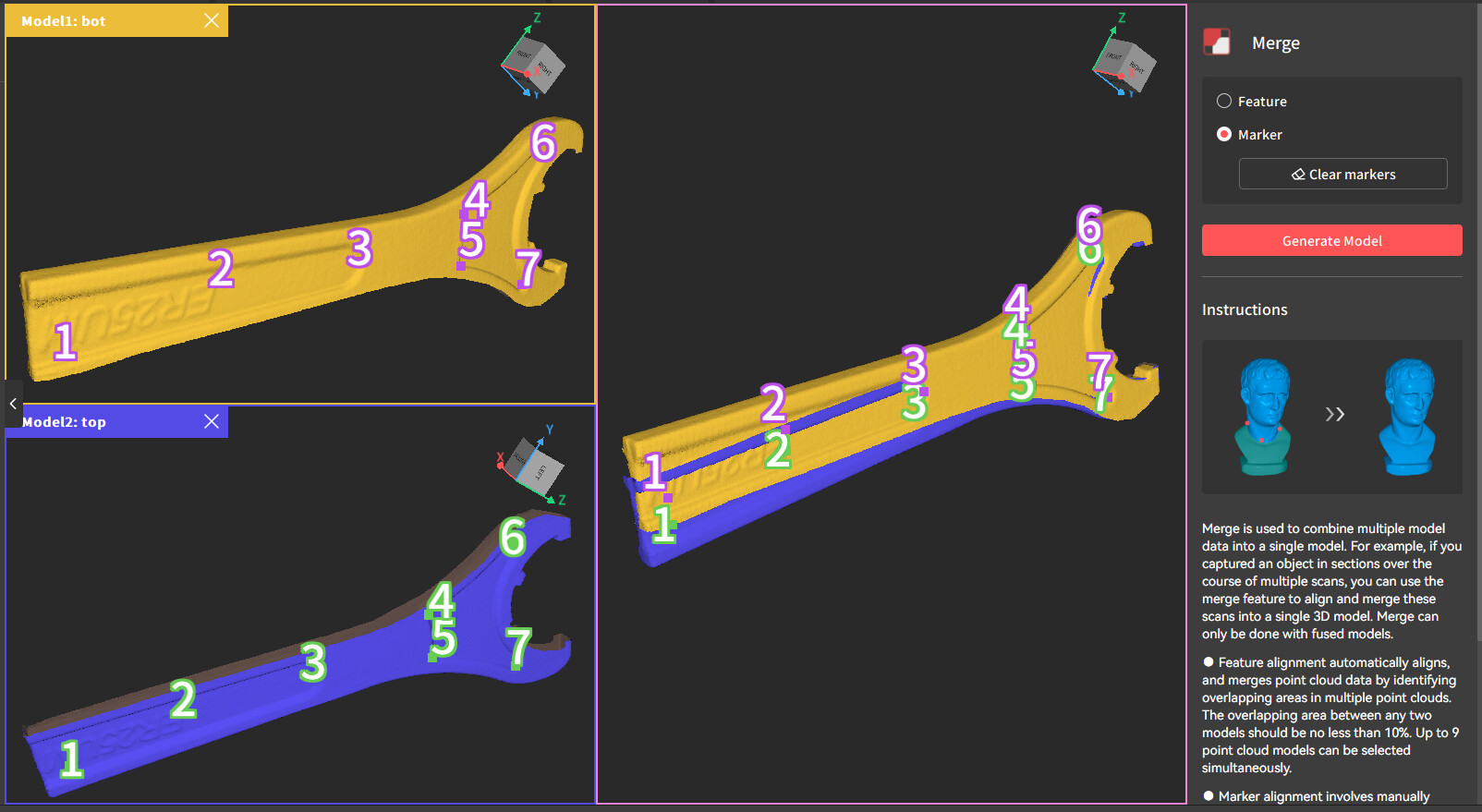
I tried again by scanning the wrench standing on each side followed by merging the two scans using the marker method. The result is not that good. Perhaps it is due to the fact that the features on the wrench is not too prominent or they are too symmetrical for the merging algorithm to distinguish the two sides.
Can you send me the project file zipped to putvmail@gmail.com or the 2 pointclouds zipped ?
project file just sent
1 Like